Not finished yet…
Most of the screenshots of definitions/theorems are taken from:
- Introduction to 3-manifolds by Wolfgang Lück at Bonn Germany
My masters thesis is about the following statement from the 2019 paper “The \(L^2\)-torsion function and the Thurston norm of 3-manifolds” by Friedl and Lück:
The main theorem
Theorem 5.1 (Main theorem). Let \(M\) be an irreducible 3-manifold with infinite fundamental group \(\pi\) which is not a closed graph manifold and not homeomorphic to \(S^1 \times D^2\). Let \(\mathfrak{s} \in \mathrm{Spin}^c(M)\) and write \(\pi = \pi_1(M)\).
Then there exists a \((H_1)_f\)-factorizing epimorphism \(\alpha\colon \pi \to \Gamma\) to a virtually finitely generated free abelian group such that the following holds: For any \(\phi \in H^1(M; \mathbb{Q})\) and any factorization of \(\alpha\colon \pi \to \Gamma\) into group homomorphisms \(\pi \xrightarrow{\mu} G \xrightarrow{\nu} \Gamma\) for a residually finite countable group \(G\), there exists a real number \(D\) depending only on \(\phi\) but not on \(\mu\) such that for \(t \leq 1\)
\[\tfrac{1}{2}\bigl(\phi(c_1(\mathfrak{s})) + x_M(\phi)\bigr)\ln t - D \;\leq\; \rho^{(2)}(M, \mathfrak{s}; \mu, \phi)(t) \;\leq\; \tfrac{1}{2}\bigl(\phi(c_1(\mathfrak{s})) + x_M(\phi)\bigr)\ln t\]
and such that for \(t \geq 1\)
\[\tfrac{1}{2}\bigl(\phi(c_1(\mathfrak{s})) - x_M(\phi)\bigr)\ln t - D \;\leq\; \rho^{(2)}(M, \mathfrak{s}; \mu, \phi)(t) \;\leq\; \tfrac{1}{2}\bigl(\phi(c_1(\mathfrak{s})) - x_M(\phi)\bigr)\ln t.\]
In particular we get
\[\deg\bigl(\rho(M, \mathfrak{s}; \mu, \phi)\bigr) = -x_M(\phi).\]
Let us first unravel what this theorem really means step by step. Here are the terms we need to understand:
- The 3-manifold \(M\) is
- irreducible
- has infinite fundamental group
- is not a closed graph manifold
- is not homeomorphic to \(S^1 \times D^2\)
- \(\mathfrak{s} \in \text{Spin}^c(M)\) is a spin structure on \(M\).
- \(\alpha\colon \pi \to \Gamma\)
- is an epimorphism (surjective group homomorphism)
- is \((H_1)_f\)-factorizing, which means that \(\alpha\) factors through the free part of the first homology group $H_1(M)_f $
- \(\Gamma\) is a virtually finitely generated free abelian group
- \(\phi \in H^1(M; \mathbb{Q})\) is a rational cohomology class on \(M\).
- \(\mu : \pi \to G\) is a group homomorphism to a residually finite countable group \(G\).
- A group \(G\) is residually finite (aka finitely approximable) if for every non-identity element \(g \in G\), there exists a finite index normal subgroup \(N \triangleleft G\) such that \(g \notin N\). Intuitively, this means that the group can be approximated by its finite quotients.
- \(\rho^{(2)}(M, \mathfrak{s}; \mu, \phi)(t)\) is the \(L^2\)-torsion function associated to \(M\), \(\mathfrak{s}\), \(\mu\), and \(\phi\) evaluated at \(t\).
The manifold \(M\)
Lets inspect the first requirements:
Let \(M\) be an irreducible 3-manifold with infinite fundamental group \(\pi\) which is not a closed graph manifold and not homeomorphic to \(S^1 \times D^2\). Let \(\mathfrak{s} \in \mathrm{Spin}^c(M)\) and write \(\pi = \pi_1(M)\).
Further up in the text the authors specify that all manifolds are compact, connected, and oriented, unless otherwise specified. So \(M\) must be as well.
Irreducible
We have a definition by Friedl in “AN INTRODUCTION TO 3-MANIFOLDS”
The prime decomposition theorem A 3-manifold \(N\) is called prime if \(N\) can not be written as a non-trivial connected sum of two manifolds, i.e. if \(N = N_1 \# N_2\), then \(N_1 = S^3\) or \(N_2 = S^3\). Furthermore \(N\) is called irreducible if every embedded \(S^2\) bounds a 3-ball. Note that an irreducible 3-manifold is prime, conversely if \(N\) is a prime 3-manifold, then either \(N\) is irreducible or \(N = S^1 \times S^2\). We now have the following theorem:
For this we need to define the connected sum of two 3-manifolds:
Given 2-oriented 3-manifolds \(N_1\) and \(N_2\) we can consider the connected sum \[N_1 \# N_2 = (N_1 \setminus \text{3-ball}) \cup (N_2 \setminus \text{3-ball}),\] where we identify the two boundary spheres using an orientation reversing homeomorphism. Note that the diffeomorphism type of the
In the case of 2-manifolds, this video visualizes it well:
and for 3-manifolds (specifically \(\mathbb{R}^3 \# \mathbb{R}^3\)) this can be seen as adding a wormhole between two copies of \(\mathbb{R}^3\):
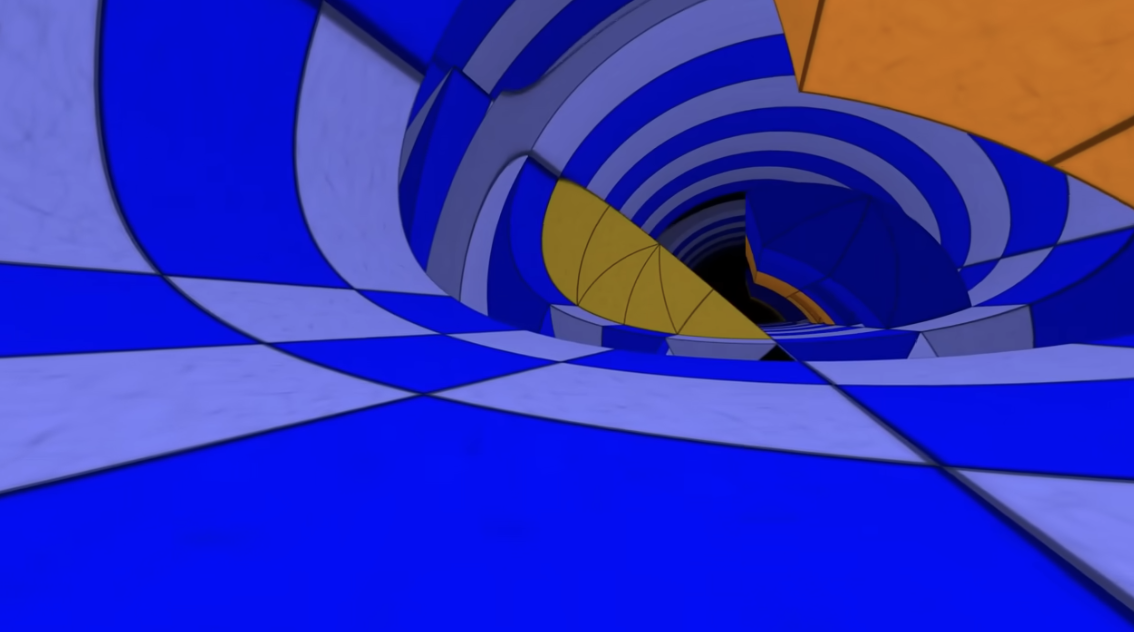
Or another way to look at this connected sum is by “cutting out” some region in \(N_1\) and “pasting” \(N_2\) in there. We may even do this an infinite amount of time in a checkerboard pattern, as shown here:
In this video the relevant section shows this infinite tiling where 3-manifolds with different geometries are glued together in an alternating pattern:
So being irreducible means either of the following equivalent conditions hold:
- every embedded \(S^2\) of \(M\) bounds a \(D^3\).
- \(M\) is prime (\(M = N_1\# N_2 \implies N_1 = S^3 \text{ or } N_2 = S^3\)) or \(M = S^1 \times S^2\).
Infinite fundamental group
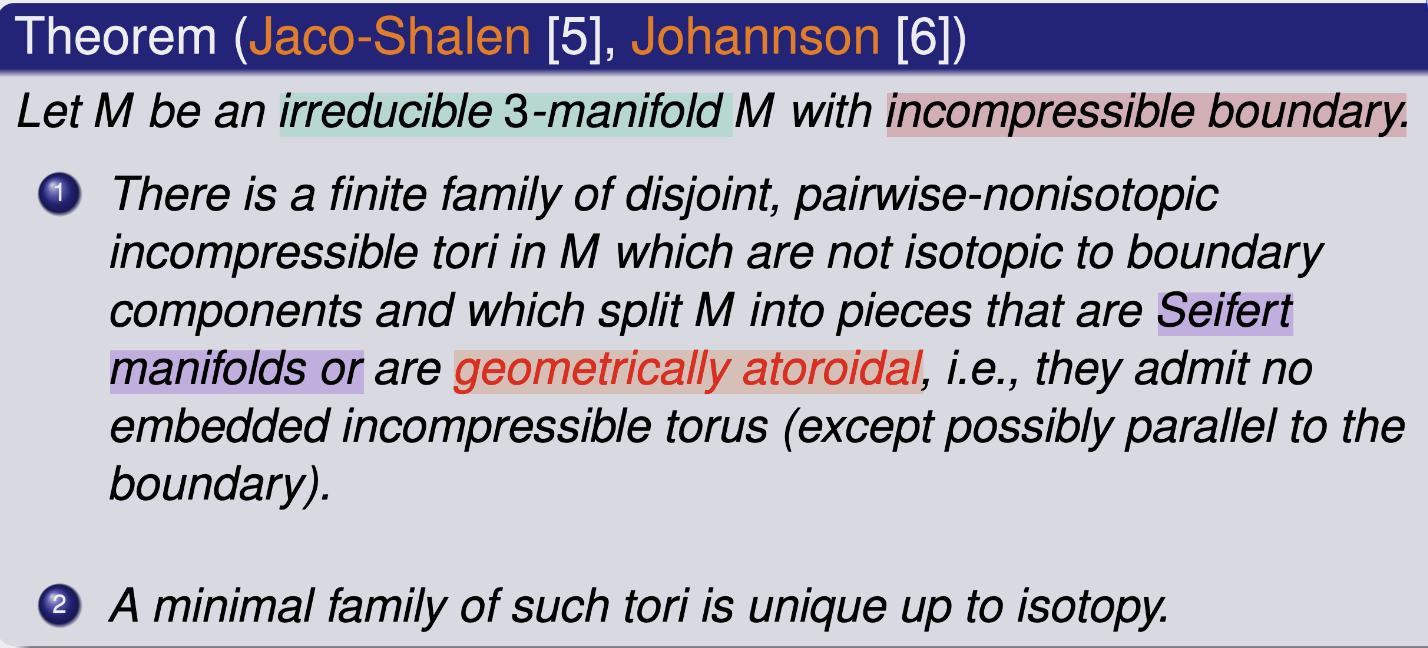
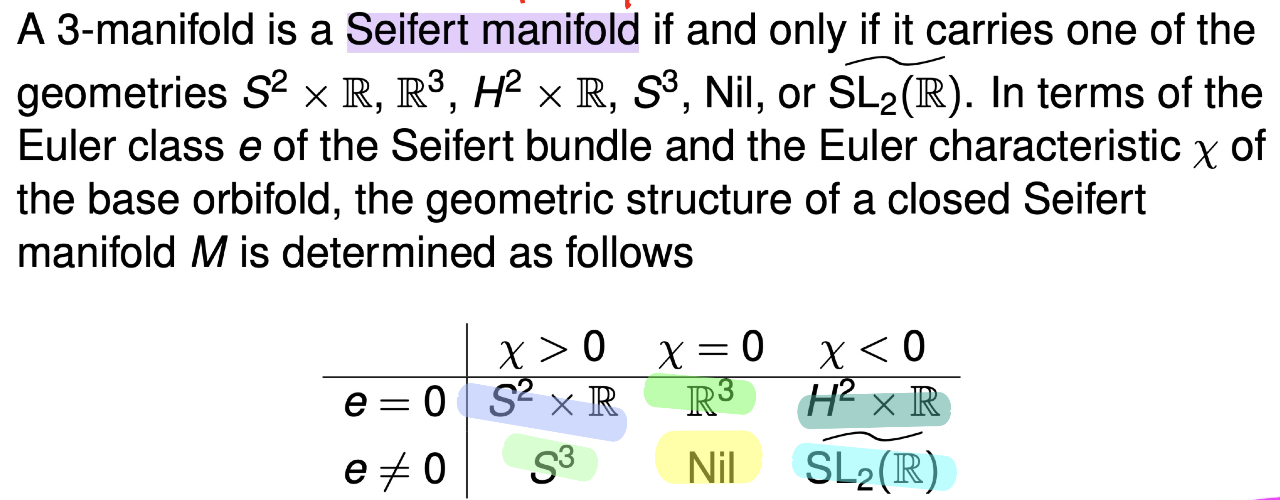
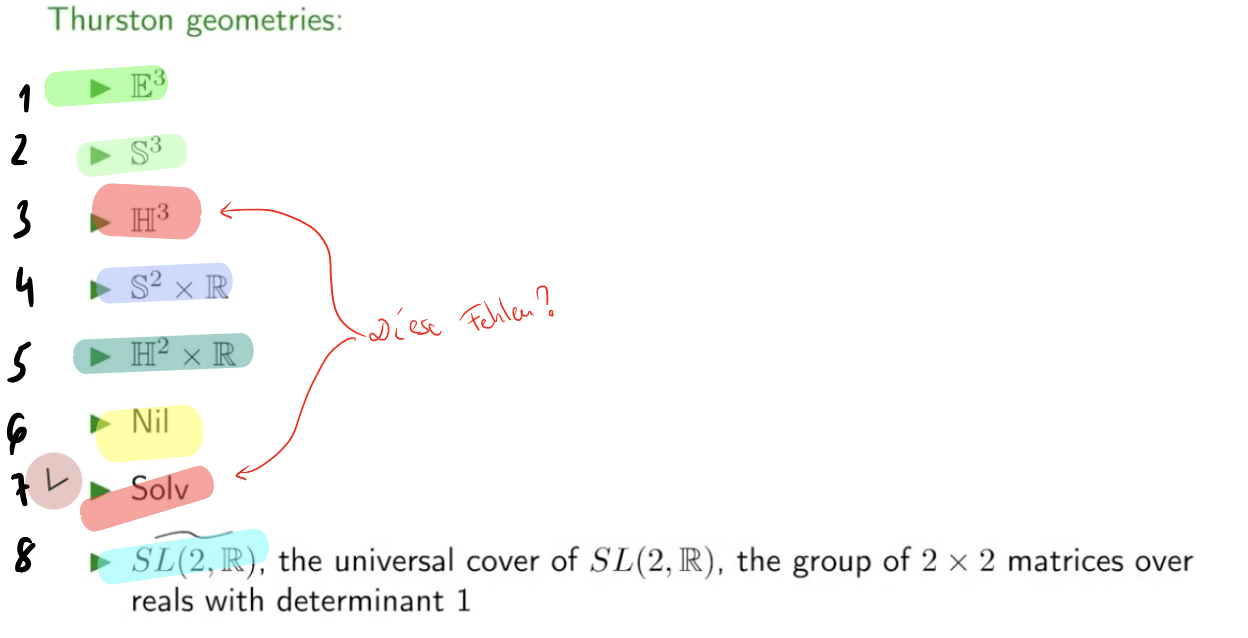
Aka. \(\|\pi_1(M)\| = \infty\). We use this to apply the famous Thurston geometrization theorem (these slides are from Lücks “Introduction to 3-manifolds” talk in Bonn):

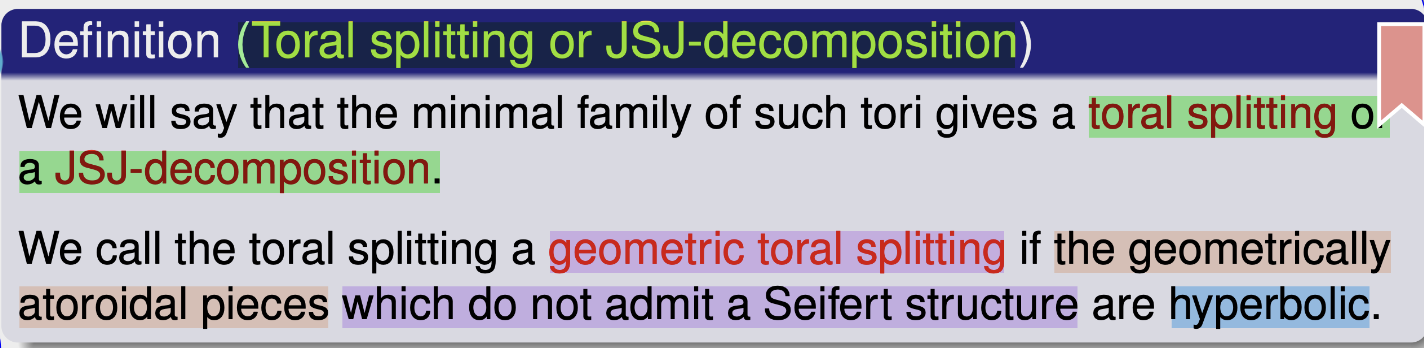
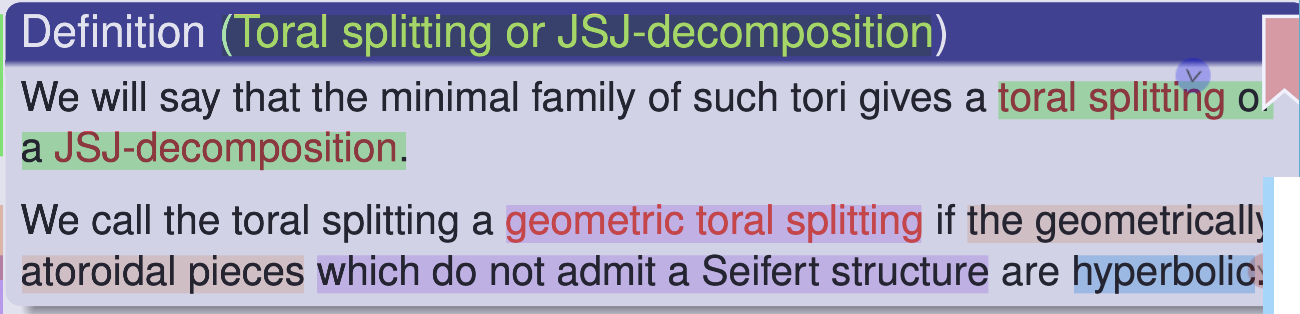
What is a “geometric toral splitting” you may ask?
Here is a tool to play around this this definition (it only includes tori, and no framed knots!):
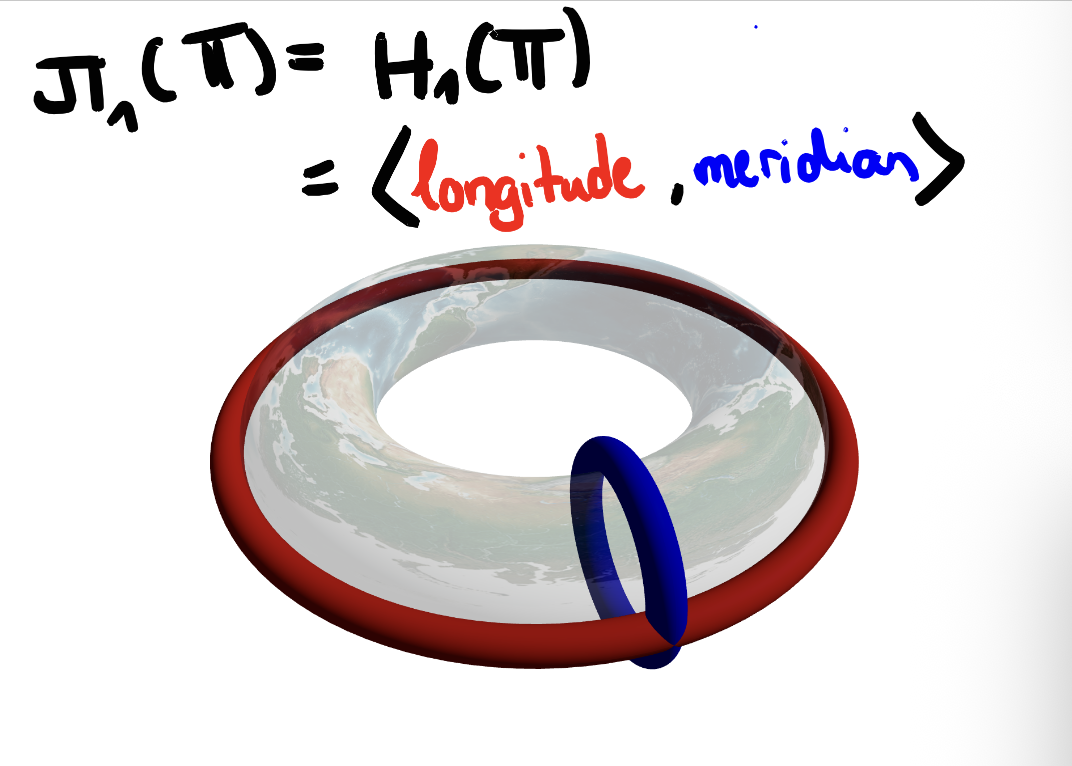
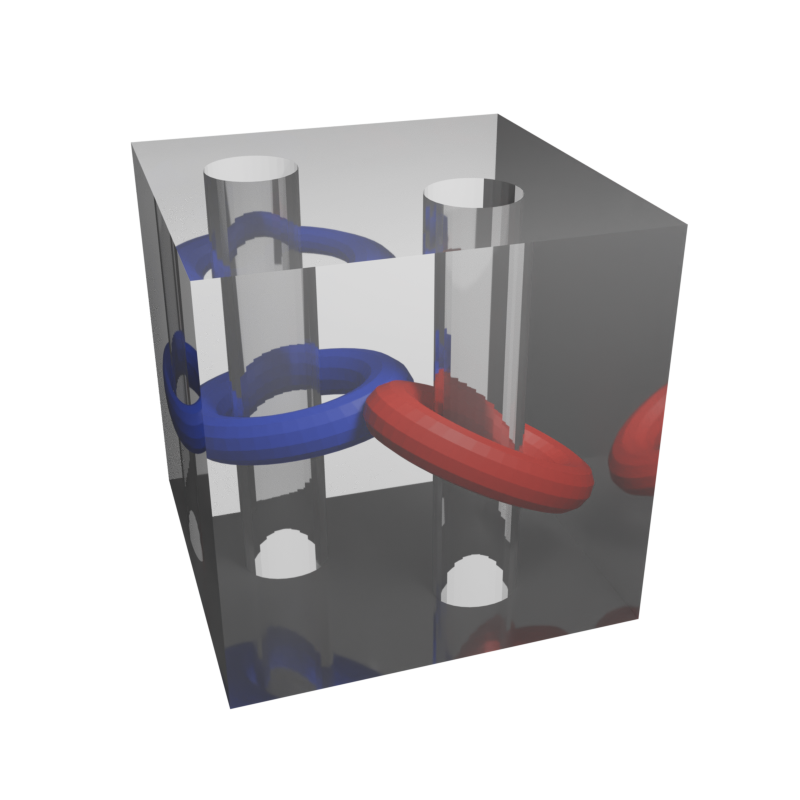
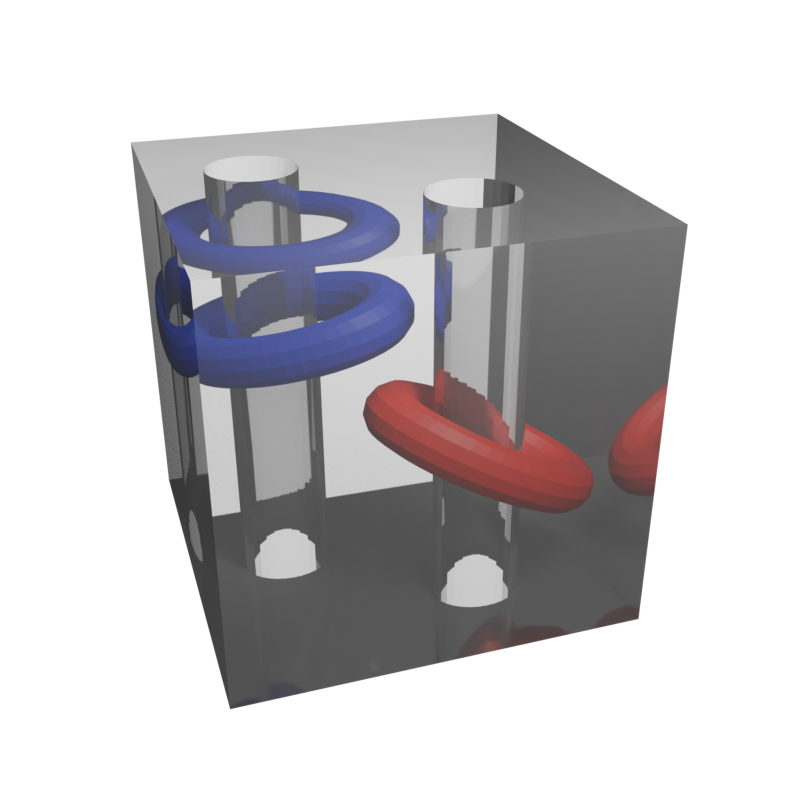
A surface \(\iota : S \hookrightarrow M\) is incompressible, if it induces an injection on the fundamental groups, i.e. \(\pi_1(\iota) : \pi_1(S) \hookrightarrow \pi_1(M)\) is injective.
What could cause \(\pi_1(\iota)\) to fail at being injective? By the Hurewicz theorem, the first homology group \(H_1(S)\) is the abelianization of \(\pi_1(S)\), but for \(S\) a torus, \(\pi_1(S) = \mathbb{Z}^2\) is already abelian, so \(H_1(S) = \pi_1(S)\). \(H_1(S)\) is generated by the longitude and the meridian of the torus, so if either of those is sent to zero by \(\pi_1\), then \(\pi_1(\iota)\) cannot be injective.
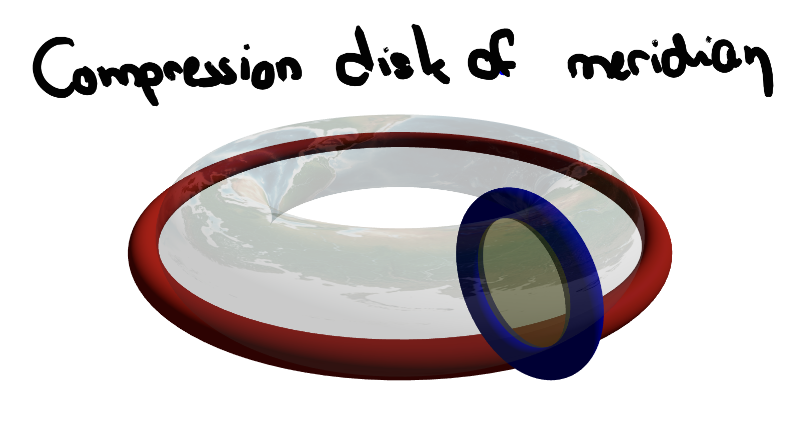
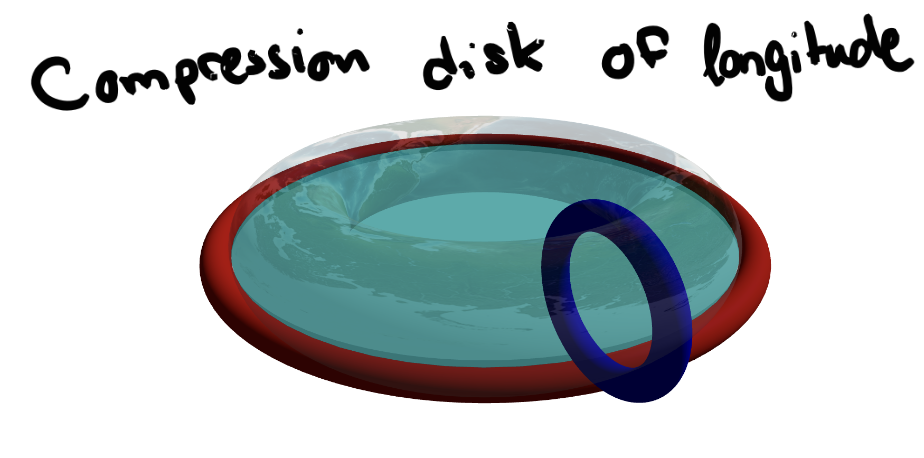
Remember, that either of these loops will dissapear, if the ambient manifold \(M\) contains a disk (a compressing disk), which will allow these loops to be contracted to a point:
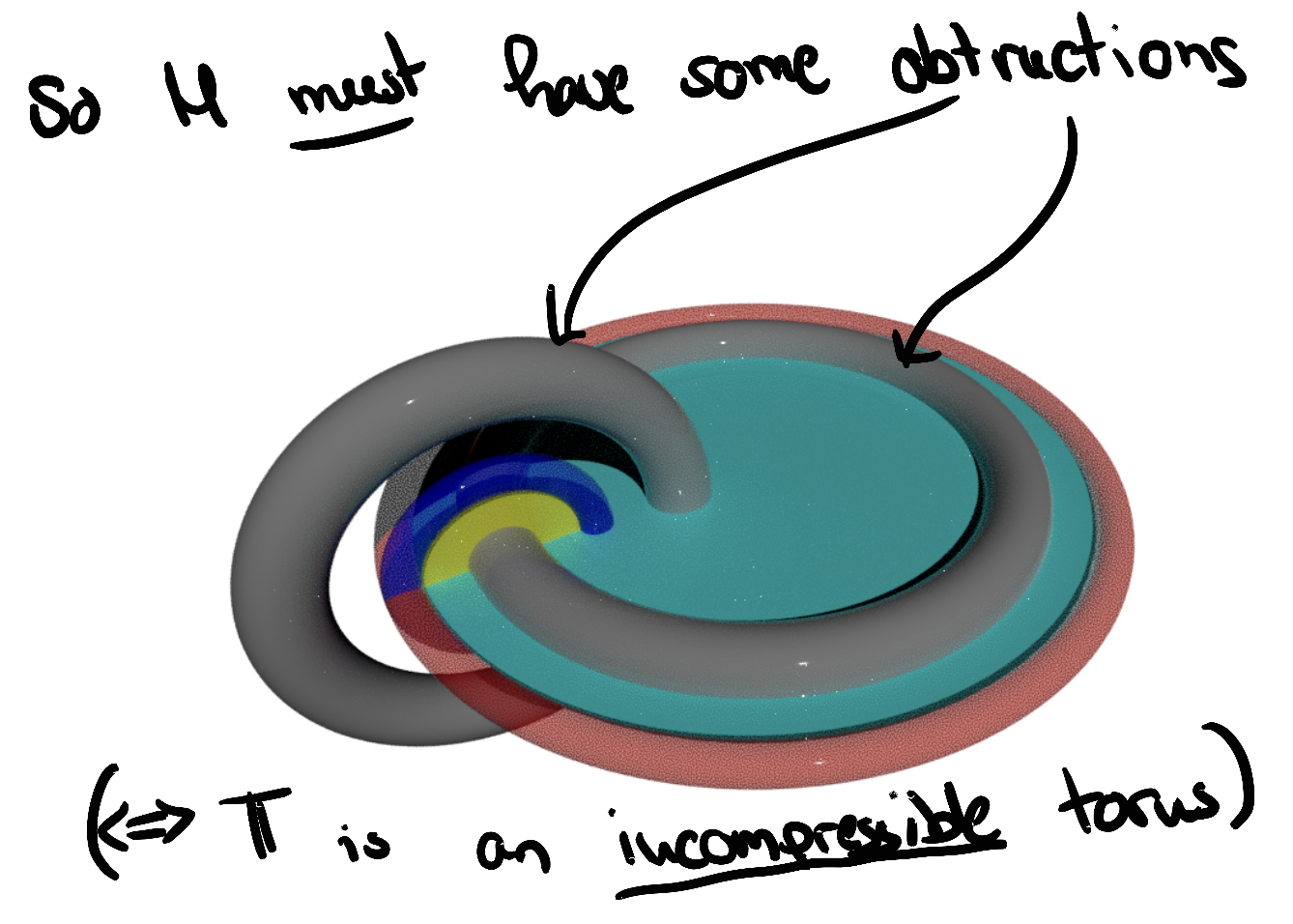
Well, these disks cannot exist, iff \(M\) contains some obstruction to prevent such complressing disks.
This also explains what it means for \(M\) to have “incompressible boundary”: \[ \pi_1(\partial M) \hookrightarrow \pi_1(M) \text{ is injective} \]
This covers “disjoint” and “incompressible”. What does it mean for a torus to not be isotopic to a boundary component? Lets consider an example:
As an example of a torus which is isotopic to a boundary component is given here (for \(\partial M \cong \mathbb{T}\))

Seifert manifolds
Specifically, these are Seifert manifolds:




and these are not seifert manifolds:

geometrically atoroidal
closed
A manifold without bounadary which is compact is called closed, so \(M\) must have empty boundary.
Graph manifolds
By Wolfang Lück’s talk as mentioned above, we have this definition:

And we have already inspected this under infinite-fundamental-group
the spin structure \(\mathfrak{s} \in \text{Spin}^c(M)\)
We will not look too much into what this means. By Liu we know that omitting this parameter in the function \(\rho\) from the main theorem, we still obtain the same asymptotic degree. In fact, omitting this parameter yields a family of functions \([\rho] = \{\rho(t) \cdot t^r \mid \exists r \in \mathbb{R}\}\)
This however does not change \(\deg(\rho)\). For clarity though, we have
Spin and Spinc. Here \((V, g)\) denotes a real vector space \(V\) equipped with an inner product \(g\), i.e., a symmetric, positive-definite bilinear form. In the setting of 3-manifolds, \(V\) is typically a tangent space \(T_p M\) and \(g\) the Riemannian metric.
Recall that the Spin group associated to \((V, g)\) is defined by \[\operatorname{Spin}(V) := \{ v_1 \cdots v_m \mid m \text{ even}, |v_i| = 1 \} \subset \operatorname{Cl}(V)^*,\] where \(\operatorname{Cl}(V)^*\) denotes the group of units in the Clifford algebra \(\operatorname{Cl}(V)\). More generally, given a vector space \(V\) over a field \(K\) and a quadratic form \(Q : V \to K\), the Clifford algebra is defined as the quotient algebra \[\operatorname{Cl}(V, Q) = T(V)/I_Q,\] where \(I_Q\) is the two-sided ideal in the tensor algebra \(T(V)\) generated by all elements of the form \(v \otimes v - Q(v)1\) for all \(v \in V\).
Definition (Complex Spin Group, D 1.1). The complex spin group \(\operatorname{Spin}^c(V)\) is the group generated by \(\operatorname{Spin}(V)\) and \(\mathrm{U}_1\) inside the group \(\operatorname{Cl}^c(V)^*\). If \(V = \mathbb{R}^n\), we write \(\operatorname{Spin}^c_n := \operatorname{Spin}^c(\mathbb{R}^n)\).
Since \(\mathrm{U}_1\) lies in the center of \(\operatorname{Cl}^c(V)\) and \(\operatorname{Spin}(V) \cap \mathrm{U}_1 = \{\pm 1\}\), it follows that \[\operatorname{Spin}^c(V) = \operatorname{Spin}(V) \times_{\mathbb{Z}_2} \mathrm{U}_1.\]
Definition (Spinc Structure, D 2.2). A spinc structure on \(M\), denoted by \(\sigma\), consists of a principal \(\operatorname{Spin}^c_n\)-bundle \(P_{\operatorname{Spin}^c}(\sigma)\) together with a bundle map \[\xi^c : P_{\operatorname{Spin}^c}(\sigma) \to P_{\mathrm{SO}}\] which is \(\operatorname{Spin}^c_n\)-equivariant with respect to the homomorphism \(\xi^c_0 : \operatorname{Spin}^c_n \to \mathrm{SO}_n\). The pair \((M, \sigma)\) is called a spinc manifold.
Since \(\operatorname{Spin}^c(V)\) is a double cover of Lie groups of \(\operatorname{SO}(V) \times \mathrm{U}_1\), these structures can be used to describe spinor bundles.

The first Chern class. The key datum attached to a Spinc structure \(\mathfrak{s}\) that appears in Theorem 5.1 is its first Chern class \(c_1(\mathfrak{s}) \in H^2(M; \mathbb{Z})\). Given \(\mathfrak{s}\), one forms the determinant line bundle \[L(\mathfrak{s}) := P_{\operatorname{Spin}^c}(\mathfrak{s}) \times_{\operatorname{Spin}^c_3} \mathbb{C},\] where \(\operatorname{Spin}^c_3\) acts on \(\mathbb{C}\) via the determinant character \([q, z] \mapsto z^2\); then \(c_1(\mathfrak{s}) := c_1(L(\mathfrak{s})) \in H^2(M;\mathbb{Z})\).
For a closed oriented 3-manifold \(M\), Spinc structures always exist (since \(w_2(M) = 0\) for all orientable 3-manifolds, one can always lift the frame bundle from \(\operatorname{SO}_3\) to \(\operatorname{Spin}^c_3\)). Moreover, the set \(\operatorname{Spin}^c(M)\) is an affine torsor over \(H^2(M;\mathbb{Z})\): given two Spinc structures \(\mathfrak{s}, \mathfrak{s}'\) there is a unique \(a \in H^2(M;\mathbb{Z})\) such that \(c_1(\mathfrak{s}') = c_1(\mathfrak{s}) + 2a\).
In the statement of Theorem 5.1, the Spinc class enters through the combination \(\phi(c_1(\mathfrak{s}))\), which for a closed oriented 3-manifold is the integer \[\phi(c_1(\mathfrak{s})) = \langle \phi \cup c_1(\mathfrak{s}),\, [M] \rangle \in \mathbb{Z},\] where \(\phi \in H^1(M;\mathbb{Z})\), \(c_1(\mathfrak{s}) \in H^2(M;\mathbb{Z})\), and \([M] \in H_3(M;\mathbb{Z})\) is the fundamental class. This shifts the asymptotic slopes of \(\rho^{(2)}\) by a fixed amount depending on \(\mathfrak{s}\); in particular, the degree \(\deg(\rho) = -x_M(\phi)\) is independent of \(\mathfrak{s}\).
TODO
\[\boxed{\deg\bigl(\rho^{(2)}(M,\mathfrak{s};\mu,\phi)\bigr) = -x_M(\phi) \quad \text{(up to the Spin}^c\text{ shift)}}\]